
Sie sehen gerade einen Platzhalterinhalt von Youtube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenKI im Feldversuch: Benjamin Kisliuk im Videoportrait
VolkswagenStiftung
Benjamin Kisliuk muss heute noch schmunzeln, wenn er an die Anfänge seines aktuellen Forschungsprojekts zurückdenkt. Im Januar 2020 begann der Informatiker am DFKI-Labor Niedersachsen, dem Osnabrücker Standort des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI), in einem Team zu arbeiten, das autonome Robotersysteme für die Landwirtschaft entwickelt. Die Idee: Das Gerät wird am Rand eines Felds abgestellt und gestartet. Die nächsten Tage, Wochen oder gar Monate bewegt es sich vollkommen eigenständig fort und sammelt eine Unmenge wertvoller Daten: Wie gut wachsen die Pflanzen? Haben sie genug Wasser? Gibt es Schädlingsbefall? Wie ist die Bodenbeschaffenheit? Geht ihm der Strom aus, holt er sich selbst neuen aus einer solarbetriebenen Ladestation. „Unsere Vision war ein großer, 200 Kilogramm schwerer Saugroboter für das Feld. Man drückt einmal auf Start und schaut vielleicht in einem Monat nochmal vorbei, um die Kameras zu reinigen.“
Das Problem: Die mobile Roboterplattform, auf der am Ende all die Kameras und Sensoren durch die Felder gleiten sollten, kam einfach nicht an. Kisliuks Kollege hatte sie aus Norwegen ans DFKI Osnabrück bestellt, wo er als Doktorand im Bereich Agrartechnik arbeitet. Doch Anfang 2020 steckte man mitten in der Corona-Pandemie, weltweite Lieferketten brachen zusammen. „Es hat tatsächlich eineinhalb Jahre gedauert, bis das Gerät endlich bei uns war“, erzählt Kisliuk. „Das war natürlich nervenaufreibend. Die meisten Vorarbeiten waren abgeschlossen, wir hatten Tests mit einem kleineren Roboter gemacht, Drohnen losgeschickt, um Luftaufnahmen anzufertigen. Auch die Messgeräte standen alle schon bereit. Uns hat es also extrem in den Fingern gejuckt, endlich loslegen zu können.“
Daten sammeln auf dem Feld
Statt auf die Lieferung des Roboters zu warten, streiften Kisliuk und ein Kollege kurzerhand selbst durch die Felder, die bis zu 20 Kilogramm schweren Messgeräte geschultert. Auf diese Weise sammelten sie die Daten, die eigentlich die Maschine einholen sollte. Im nächsten Schritt manövrierten die beiden Forscher die Geräte in einem Handwagen über den Acker. Und als die Plattform schließlich in Osnabrück eintraf, war sie zunächst noch weit entfernt, sich selbstständig fortbewegen zu können. „Die Navigationssoftware war ja noch gar nicht programmiert“, erzählt Kisliuk. Und so drehte die Maschine ihre ersten Runden per Fernsteuerung über die Felder, die Forscher wenige Meter dahinter und mit Joystick-Bewegungen die Richtung vorgebend. „Das war natürlich überhaupt nicht Sinn der Sache, aber auf diese Weise brachten wir das Gerät überhaupt erst einmal in Bewegung.“
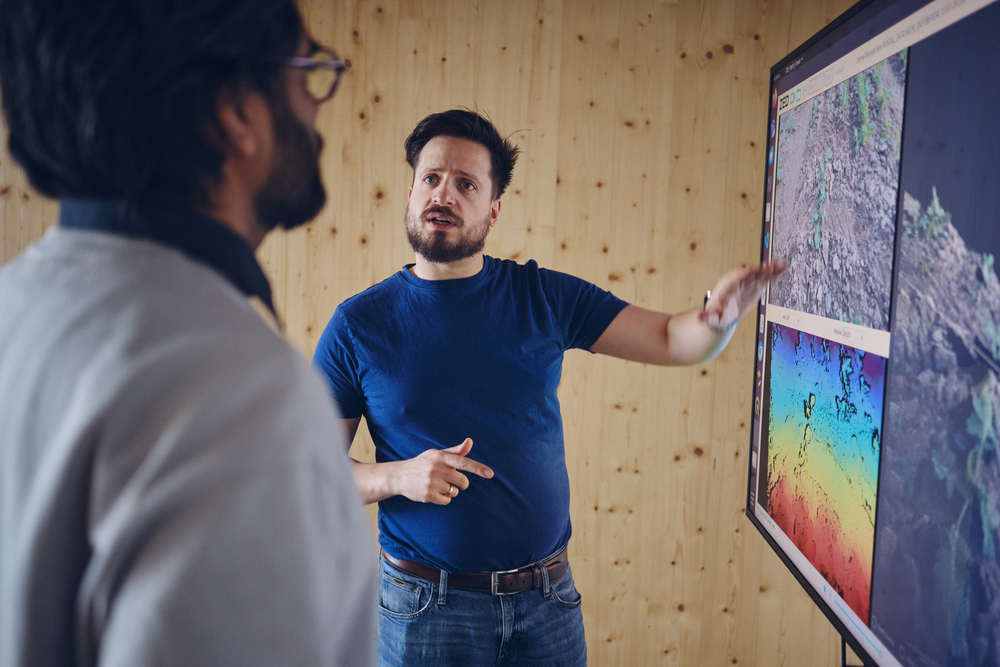
Moritz Münch für VolkswagenStiftung
Benjamin Kisliuk und sein Kollege Gurunatraj Parthasarathy (l.) besprechen Aufnahmen, die der Roboter mit verschiedenen Kameras gemacht hat.
Im Sommer 2023 war es dann endlich so weit. Kisliuk hatte die Navigationssoftware programmiert, dem Roboter also beigebracht, wie er sich von A nach B bewegt, welchen Weg er durch ein Feld voller Nutzpflanzen wählen und welche Bereiche er meiden soll. „Dann haben wir beschlossen: Jetzt setzen wir den Roboter wirklich am Feldrand ab, drücken auf Start und lassen ihn selbstständig fahren.“ Und das klappte auch wirklich, allein lassen kann man das Gerät aus Sicherheitsgründen allerdings noch nicht. Eine Ladestation hat der Feldroboter auch schon – solarbetrieben, wie im ersten Konzept angedacht. Selbstständig einparken kann er schon, am Aufladen arbeite man noch. Denn dies sei anspruchsvoll, erklärt Kisliuk. „Der Akku des Roboters muss zentimetergenau unter einer Induktionsplatte positioniert werden, sonst wird keine Energie übertragen.“
Vom Weltraum auf den Acker
Zur Robotik kam Kisliuk nach seinem Informatik-Master in Osnabrück, das er 2017 abschloss. „Mir war ziemlich schnell klar, dass ich in der angewandten Forschung arbeiten möchte. Ich mag die Vorstellung, dass die technischen Lösungen, an denen ich arbeite, am Ende für eine große Zahl von Menschen nützlich sind.“ Am DFKI-Standort Bremen bot sich die Gelegenheit, an einem Projekt für die Europäische Weltraumagentur zu arbeiten. „Für einen jungen Robotik-Forscher war das natürlich ein Traum. Ich kann mich noch gut erinnern, wie gut es sich anfühlte, auf einer Party erzählen zu können, dass man im Bereich Weltraumrobotik arbeitet.“
Zurück in den Weltraum sehnt sich Kisluik trotzdem nicht, seit er 2020 an das damals neu geschaffene „Labor Niedersachsen“ des DFKI-Standorts Bremen in Osnabrück wechselte (inzwischen ein eigenständiger DFKI-Standort) und Mars gegen Acker tauschte. „Natürlich ist die Oberfläche eines Planeten auf den ersten Blick ein spannenderes Terrain für einen Robotik-Experten als ein Rapsfeld im Emsland“, gibt er lachend zu. „Aber wenn es um gesellschaftliche Relevanz geht, dann schlägt die Agrar- die Weltraumtechnik nun einmal um Längen.“

Moritz Münch für VolkswagenStiftung
In der Werkstatt auf Gut Arenshorst in der Nähe von Osnabrück machen Benjamin Kisliuk und sein Kollege Gurunatraj Parthasarathy (r.) den Roboter fahrbereit.
Navigieren lernen
Auf dem Mars wie im Emsland ist die Navigation eine der größten Herausforderungen für einen autonomen Roboter. Die Einsatzmöglichkeiten der Geräte sind vielfältig. Ob sie nur Daten sammeln, wie die Maschine von Kisliuks Team, oder aktiv in den Pflanzenbestand eingreifen, etwa Unkraut jäten, Saat ausbringen oder ernten: Immer muss der Roboter genau wissen, wo er ist und wohin er fahren darf. „Es gibt eine Regel in der Robotik oder allgemein beim Anlernen von Maschinen: Was Menschen leicht fällt, ist oft das, womit Maschinen die größten Probleme haben“, so Kisliuk. „Das war vor 30 Jahren so und hat sich bis heute nicht geändert.“ Ein auf jegliche Kollisionsvermeidung programmierter Outdoor-Roboter wäre nicht in der Lage, über einen einzelnen, hochgewachsenen Grashalm zu fahren, selbst wenn der Rest der Fläche völlig frei wäre. „Für einen Menschen ist das natürlich überhaupt kein Problem. Einer Maschine beizubringen, dass der Weg im Freien nicht einfach frei oder besetzt ist, sondern man es mit vielen Zwischenstufen zu tun hat, ist ziemlich kompliziert“, erklärt der Forscher.
Hinzu kommt: Anders als andere Outdoor-Roboter, die sich längst mit Radar, Laser und Sonartechnik durchs Gelände navigieren, können Landwirtschaftsroboter sich nicht an vordefinierten Pfaden wie etwa Waldwegen orientieren, sondern müssen sich in einem Feld voller Pflanzen bewegen können, die für einen Laserscanner im Grunde allesamt Hindernisse darstellen. „Eine Lösung wäre, zu sagen: Dann fährt die Maschine eben bis zum Feldrand mit Kollisionserkennung und sobald sie auf dem Feld ist, schaltet sich das System ab.“ Aber das wäre natürlich hochproblematisch, gibt Kisliuk zu bedenken. „Unser Roboter wiegt bereits mehr als 200 Kilogramm. Stellen Sie sich ein autonomes Gerät vor, das mehrere Tonnen wiegt. Dann ist es natürlich unverantwortlich, eine solche Maschine ohne Sicherheitssystem über ein Feld fahren zu lassen, auf dem sich etwa Tiere oder, im schlimmsten Fall, sogar Menschen aufhalten könnten.“

Moritz Münch für VolkswagenStiftung
Mit verschiedenen Kameras, darunter Stereo- Laser- und Wärmekameras, erstellt der Agrarroboter detaillierte Daten über den Zustand der Pflanzen.
Laserkanone gegen Unkraut
Statt auf Objekterkennung setzt Kisliuk bei der Navigation seines Roboters deshalb auf GPS-Daten, die für landwirtschaftliche Zwecke bereits in hoher Auflösung vorliegen. „Damit können wir dann sehr genau die Wege definieren, die der Roboter abfahren darf.“ Zusätzlich können auf Basis von Drohnen- und Satellitendaten sogenannte semantische Karten erstellt werden, die für bestimmte Flächen bestimmte Eigenschaften definieren. So kann ein Roboter beispielsweise erkennen, ob es sich bei einer Rasenfläche um einen Garten oder eine Weide handelt. Hinzu kommen externe Inputs, welche die Maschine zur Navigation nutzen kann – etwa Informationen zur Bodenbeschaffenheit. „Wir können dem Roboter beibringen, nach Regen nicht über eine Ackerfläche zu fahren, um nicht zu riskieren, dass er im Schlamm steckenbleibt.“
Für die Zukunft hofft Kisliuk, die am DFKI-Standort Osnabrück auch mit Unterstützung des Niedersächsischen Wissenschaftsministeriums und der VolkswagenStiftung aufgebaute Infrastruktur für weitere Forschungsvorhaben rund um das Thema Smart Farming nutzen zu können. Nachdem der Roboter das Navigieren gelernt hat, kann man sich auch Anwendungen widmen, die über das reine Sammeln von Daten hinausgehen. In einem gerade gestarteten Projekt am DFKI-Standort Niedersachsen soll Lasertechnologie zur Unkrautbekämpfung eingesetzt werden. Aus Brandschutzgründen werden die Pflanzen dabei nicht entflammt, sondern lediglich auf 60 Grad erhitzt und damit abgetötet.
Star Wars auf dem Acker? „Das Projekt klingt zunächst vielleicht etwas schräg“, gibt Kisliuk zu. „Aber das Spannende ist: Sie können auf dem Feld viel mehr experimentieren als bei der Entwicklung eines Mars-Rovers.“

Moritz Münch für VolkswagenStiftung
Testacker auf Gut Arenshorst, wo die Roboter des DFKI im Gelände erprobt werden.